:quality(80)/p7i.vogel.de/wcms/61/7d/617df3f750b56a11b602c6c6bead6b5e/0132480606v2.jpeg "Dr. Jochen Schröder ist seit April 2026 Vorstand Produktion, Supply Chain Management und Einkauf der Schaeffler AG. (Bild: Schaeffler/Daniel Karmann)")
:quality(80)/p7i.vogel.de/wcms/39/2a/392a81f7003a672027c12219def92e33/denza-b5c-5000x2811v1.jpeg "Der Autokonzern BYD drängt mit seinen Marken vehement auf die Weltmärkte. (Bild: BYD)")
:quality(80)/p7i.vogel.de/wcms/30/7c/307c76336702f3a96a1fdb7d1b3acdad/0132403507v2.jpeg "Zulieferer für Verbrennertechnik suchen neue Geschäftsfelder. (Bild: Gemini / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/cb/2b/cb2bd2ea591c17565f1bda6c361af5d9/b2026cw00124-large-4096x2304v1.jpeg "Volkswagen versucht, mit speziell für China entwickelten Modellen auf dem dortigen Markt wieder erfolgreicher zu werden. (Bild: Volkswagen AG)")
:quality(80)/p7i.vogel.de/wcms/fc/fd/fcfd1addd89cec040cf0e57a296d6d30/0126533664v1.jpeg "Oliver Blume, Vorstandschef von Volkswagen, will noch in diesem Jahr das Sparpaket für den Autobauer auf den Weg bringen. (Bild: Volkswagen AG)")
:quality(80)/p7i.vogel.de/wcms/93/38/93383853b1bca8c7d2385eac5cc0c560/1aca7c56047eab222be45e7ef68bfb69a3688cb0v1.jpeg "Das Crossover-Coupé soll noch 2027 auf den Markt kommen und weicht als erstes Modell der Marke von der klassischen SUV-Silhouette ab. (Bild: Land Rover)")
:quality(80)/p7i.vogel.de/wcms/b9/98/b99846c77dca711b9aea5b09a1ac3aa1/a-online-listing-varta-microbattery-fe-1-scaled-e1620285614997-jpg-20v-3591x2018v1.jpeg "Die Varta AG ist insolvent. (Bild: Varta)")
:quality(80)/p7i.vogel.de/wcms/74/95/7495d7e6e72e039bc56f00c08a80244e/0132470715v2.jpeg "Die Fraunhofer Forschungsfertigung Batteriezelle (FFB Fab) in Münster. (Bild: Michael Möller)")
:quality(80)/p7i.vogel.de/wcms/0a/f3/0af3d0f08482c85bc6614d31ad5fcfb4/db2022au01074-large-2682x1510v1.jpeg "Volkswagen will ab 2027 autonomes Fahren in China anbieten. (Bild: Volkswagen)")
:quality(80)/p7i.vogel.de/wcms/52/c6/52c63e507be7792558b24dece8059bc3/ef4fe441783cf47406cd728c7b1f4e1bf7c3bde9v1.jpeg "Mit der Übernahme von Precision Innovations erweitert Siemens sein Portfolio im Bereich der elektronischen Designautomatisierung (EDA) um KI-gestützte Shift-Left-Funktionen für die Chip-Planung. (Bild: Siemens)")
:quality(80)/p7i.vogel.de/wcms/9e/63/9e638c9e57ce1ace24083db3b31508f1/0132377571v2.jpeg "ZF-Vorstand Andreas Moser (rechts) und Ivan Brajdic (links), Entwicklungsleiter Commercial Vehicle Solutions, erklären auf dem Commercial Vehicle Tech Day von ZF, wie Innovationen Mehrwert für Nutzfahrzeugkunden schaffen. (Bild: ZF Group)")
:quality(80)/p7i.vogel.de/wcms/9f/97/9f97565d6623c582bc43d9ed05f6178a/ford-kuga-2026-02-5000x2811v1.jpeg "Aktuell baut Ford den Kuga in Valencia. (Bild: Ford)")
:quality(80)/p7i.vogel.de/wcms/0b/5b/0b5b2c8c9c21321b3835b8755e63468b/p90650697-highres-bmw-group-plant-land-4500x2530v1.jpeg "BMW entwickelt am Standort Landshut Software für humanoide Roboter. (Bild: BMW)")
:quality(80)/p7i.vogel.de/wcms/c6/ab/c6abfe554e76f94caf8869318b570908/0132391630v2.jpeg "Mona Neubaur, Ministerin für Wirtschaft, Industrie, Klimaschutz und Energie des Landes Nordrhein-Westfalen, und Thomas Jarzombek, Parlamentarischer Staatssekretär im Bundesministerium für Digitales und Staatsmodernisierung, besuchten den Kontron-Standort in Düsseldorf. (Bild: Kontron AG)")
:quality(80)/p7i.vogel.de/wcms/dd/81/dd81f5fa27486347509ad77eeeb3e045/e2c20216-eadb-4571-8555-572018c76705-3024x1701v1.jpeg "v.l.: Das Gründerteam Andreas Fiedler, Ta-Shun Chou und Andreas Popp (Bild: NextGo Epi)")
:quality(80)/p7i.vogel.de/wcms/5c/a1/5ca10b7c08ac637d51e3d19bbf4f4819/9deece97c4b5fc33890a6abb40dd0a71ed39dfb5-3000x1687v1.jpeg "Auch der Renault Mégane ist seit dem Lifting mit LFP-Option zu haben (Bild: Renault)")
:quality(80)/p7i.vogel.de/wcms/d5/c9/d5c93517bc32c9bbc5c62cf9f6deefd8/continental-pp-korbach-photovoltaik-3840x2158v1.jpeg "Photovoltaikanlagen im Continental-Reifenwerk in Korbach: Ein neuer Windpark liefert bald zusätzliche Energie für das Werk. (Bild: Continental)")
:quality(80)/p7i.vogel.de/wcms/8f/c8/8fc889069f04a967045eab808c1cd22e/p90565791-highres-30-years-of-bmw-grou-4961x2789v1.jpeg "Für Altfahrzeuge gibt es in Europa künftig strengere Regeln für deren Recycling. (Bild: BMW)")
Sensorsysteme 3-D-Auge für autonome Fahrzeuge
Wie können autonom fahrende Fahrzeuge ihre Umgebung möglichst genau erfassen? Ein österreichisches Forschungsprojekt arbeitet an einem selbstlernenden System.
Anbieter zum Thema
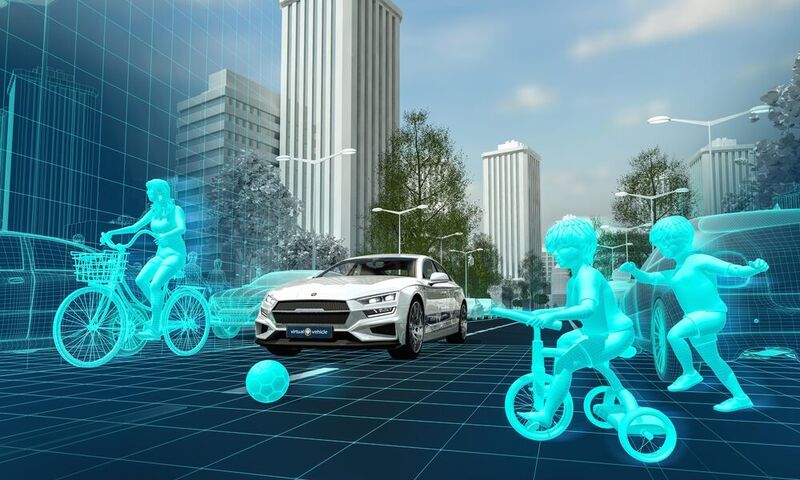
Ein dreidimensionales Abbild der Umgebung erstellen und Gefahren vorausschauend erkennen: Im Projekt „iLIDS4SAM“ forschen elf Unternehmen an Sensorsystemen, die später in autonom fahrenden Fahrzeugen zum Einsatz kommen sollen. Ziel ist es, ein leistungsfähiges und günstiges Laser-Sensorsystem mit einem „Deep Learning“-Datenmanagement zu entwickeln. Die Tests des kompakten Sensorsystems finden im städtischen Straßen- und Schienenverkehr und bei landwirtschaftlichen Einsätzen statt. Das Projekt ist auf drei Jahre angelegt und läuft seit Januar 2020; „iLIDS4SAM“ steht für „Integrated LiDAR Sensors for Safe & Smart Automated Mobility“.
Was steckt technisch dahinter?
Damit automatisierte Fahrzeuge die Umgebung umfassend wahrnehmen können, verfolgt das Forscherteam den Ansatz des dreidimensional sehenden Auges. Neuartige und kompakte Lidar-Sensorsysteme sollen ein größeres Sichtfeld mit hoher Präzision ermöglichen. „Um die Sensoren kompakt, robust und voll integrierbar zu gestalten, müssen die dazugehörigen Komponenten, die Verbindungstechnologien und auch das Spiegel-Design optimiert und weiter miniaturisiert werden. Die Sensoren werden zum Beispiel hinter der Windschutzscheibe, im Scheinwerfer oder in den Rückleuchten eingebaut und sollen in Kombination mit Radar- oder Kamerasystemen einen 360-Grad-Blick bieten“, beschreibt eine Sprecherin des projektführenden Unternehmens Infineon Austria.
:quality(80)/images.vogel.de/vogelonline/bdb/1660100/1660189/original.jpg "Moderne Autos müssen wissen, was um sie herum passiert. (Bosch)")
Automatisiertes Fahren
Sensoren: Welche es gibt und wie sie funktionieren
Mit realen Daten entwickeln
Damit die Fahrzeuge selbstständig und sicher agieren können, müssen sich die notwendigen Daten schnell auswerten lassen. Ein wichtiger Teil des Projektes sind deshalb Testfahrten in realen Anwendungsszenarien. Damit lassen sich viele reale Daten sammeln – um mittels Signalverarbeitungsalgorithmen das Verhalten vorherzusagen und eine Gefahreneinschätzung abzuleiten.
Bei Projektstart wurde ein Datenmanagementplan implementiert, der mit der Open Source Plattform des europäischen Forschungszentrum CERN verbunden ist. So entstand ein öffentlich zugänglicher Datenpool, auf dem weitere Projekte oder Verbesserungen bestehender System aufsetzen können.
Wer ist beteiligt?
Infineon koordiniert das Projekt von seinem Entwicklungsstandort in Graz. Die Projektpartner sind: AVL List, Ams AG, EV Group E. Thallner, FH Campus Wien Forschungs- und Entwicklungs-GmbH, Peschak Autonome Systeme, Riegl Research Forschungsgesellschaft, Silicon Austria Labs, Technische Universität Graz (Institut für Maschinelles Sehen und Darstellen), TTTech Auto und Virtual Vehicle Research.
Das Projekt läuft bis Ende des Jahres 2022 und hat ein Forschungsvolumen von 5,67 Millionen Euro. Es wird im Rahmen des Programmes „IKT der Zukunft“ vom österreichischen Bundesministerium für Klimaschutz, Umwelt, Energie, Mobilität, Innovation und Technologie (BMK) co-finanziert und von der Forschungsförderungsgesellschaft geführt.
(ID:46942954)
:quality(80)/p7i.vogel.de/wcms/85/8a/858a94f14886c9bf7f4300a18c8ea710/0129695458v2.jpeg "Das autonome Shuttle des KI-Projekts in Magdeburg bei einer Demonstration der Senordaten mit künstlichem Nebel. (Bild: Jana Dünnhaupt/Uni Magdeburg)")
:quality(80)/p7i.vogel.de/wcms/0b/54/0b543bdd6423720d53fc511cf441527d/0130908183v2.jpeg "Der Stadtbus soll ab Herbst 2026 testweise in München unterwegs sein. (Bild: Bernhard Huber)")